
来源:财经报道网
2026-06-30 14:03:32
(原标题:发力时空智能,中科煜坤完成千万元级种子轮融资,北京顺禧基金独家投资)
近日,北京中科煜坤科技有限公司(以下简称“中科煜坤”)完成千万元级人民币种子轮融资。本轮融资由北京顺禧基金独家投资。融资资金将主要用于核心产品研发、团队建设和业务拓展,加速公司新一代多模态通用时空智能技术在机器人、智能设备和复杂物理场景中的产品化落地。

图像1含义: 中科煜坤公司LOGO
中科煜坤是首家系统提出“感知硬件-空间理解-状态预测-行动决策-数据闭环”全栈时空智能技术体系的创业公司,本次融资标志着头部资本对“让机器人理解三维空间静动态物理规律并自主决策和行动”这一核心技术方向的战略级押注。
中科煜坤孵化自中国科学院自动化研究所,由中国科学院自动化研究所研究员、多模态人工智能系统全国重点实验室机器人视觉团队负责人吴毅红创立。依托机器人视觉团队在时空智能、三维计算机视觉和机器人方向30多年的科研成果和技术积累,公司提出“时空智能”(Spatial-Temporal Intelligence)这一技术主张——面向机器人从封闭可控场景走向开放、动态、大范围真实物理世界的核心需求,致力于让机器人具备对三维空间结构、语义属性、动态变化、社会规则和人类指令的综合理解与行动能力,让机器人在开放世界里“不迷路、能规划、会决策”。
PART.01
“看见”不等于“理解”
时空智能缺失是机器人规模化落地的最大瓶颈
今天的机器人能在实验室里精准抓取物体,但是会在真实的环境中被一束反光、突然出现的人或临时摆放错位的物体难住——不是因为机器人不够聪明,而是因为缺少对三维空间和动态变化的“时空理解力”。
随着大模型技术快速发展,机器人和具身智能正在从“能感知、能执行”走向“能理解、能规划、能自主作业”。但在真实场景中,机器人仍然面临四大挑战:空间几何不稳定(环境变化导致定位漂移等)、动态环境预测不足(无法预判移动物体的轨迹)、语义理解与行动规划割裂(“看到”但不“理解”其行动含义)、跨场景泛化能力弱(换一个环境就需要重新适配)。
PART.02
全栈技术破局
从“看见空间、理解空间、预测空间”到“执行决策”
围绕这一问题,中科煜坤提出了新一代多模态通用时空智能基础模型框架。该框架以真实世界数据为基础,将空间几何、多模态推理、世界模型和行动模型进行系统融合,形成“感知硬件-空间理解-状态预测-行动决策-数据闭环”的技术体系。
与单点算法或单一云端模型路线不同,中科煜坤更强调端侧实时感知能力与基础模型能力的协同,使机器人能够在开放动态场景中完成长程作业和交互。
在核心技术上,中科煜坤构建了五大能力层组成的完整技术栈:
高质量时空数据层:通过多模态设备自主高效采集真实空间数据,构建可用于模型训练与仿真的时空数据体系;

动图1解释:中科煜坤团队自研4DGS方法一分钟内完成高保真4D动态场景重建,快速构建时空基础数据,成果将在ECCV2026公开展示
空间几何层:围绕几何退化、长尾分布持续研发,以提升系统稳定性、轻量化和泛化能力;
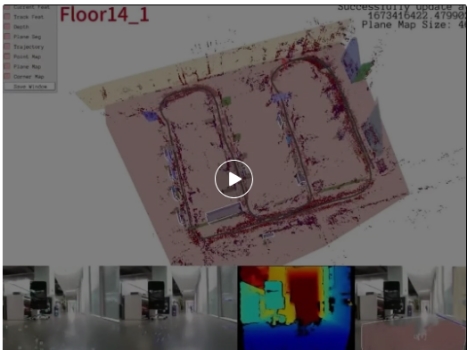
视频1解释:中科煜坤团队提出融合多几何特征的建图与定位系统实现在退化场景中精确鲁棒的位姿估计,成果发表在机器人顶级期刊TRO,并在ICRA2026上进行了公开展示
多模态推理模型:引入轻量化多模态推理能力,支持场景空间语义理解、社会规则理解和人机多模态交互;

视频2解释:中科煜坤团队自研空间推理方法首次将混合专家模型(MOE)引入到空间理解与推理领域,成果将在ECCV2026公开展示
世界模型层:融合数据驱动与物理机理,实现轻量化高鲁棒三维空间结构一致性预测、物理规律理解和动态物体意图建模;

动图2解释:中科煜坤团队自研世界模型实现对物理世界时空一致性的4D预测
行动模型层:将推理、预测与决策进行端到端融合,并融入人的指令与意图、社交规则等,实现机器人快速、平稳、顺滑的类人作业能力。
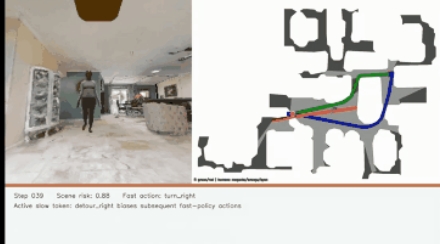
动图3解释:中科煜坤团队自研端到端导航系统,实现复杂动态场景的高可靠性导航
以上五层能力相互支撑、闭环迭代,构成中科煜坤的核心技术壁垒。
PART.03
“近30年学术沉淀+产业实战经验”
稀缺的团队组合
创始人吴毅红研究员长期从事三维计算机视觉、空间智能研究,是中国科学院自动化研究所多模态人工智能系统全国重点实验室机器人视觉团队负责人、博士生导师。吴毅红研究员已发表顶级期刊/会议等论文150余篇,授权和申请发明专利40余项,曾承担多项国家级科研项目,并担任多个国际顶级人工智能大会领域主席。
CEO卫浩博士长期从事同步定位与地图构建、三维场景理解、机器人导航理论与应用研究,是中国科学院自动化研究所多模态人工智能系统全国重点实验室副研究员,已发表机器人顶级期刊/会议论文20余篇,中国机器人大赛冠军队长,具有多年机器人定位导航系统开发经验。
技术负责人曾任美团等企业定位算法负责人,拥有10年机器人、自动驾驶研发和团队管理经验,具备大规模复杂场景下定位与感知系统从0到1的工程化落地能力。核心团队汇聚基础模型训练、机器人算法、硬件等方向技术骨干,成员兼具一线科技企业、头部机器人产业公司的产品化实战经验,同时配备具备多年行业销售经验、精通项目交付全流程的商业化负责人。公司团队组合不仅有世界级前沿技术洞察,也有把技术变成可量产产品的工程化能力,把产品送到客户手中的商业化经验。
PART.04
产品化路径清晰
软硬协同双轮驱动,锚定高价值场景
产品方面,中科煜坤采取“感知计算模组+时空智能基础模型”软硬协同双轮驱动的产品策略,形成数据闭环的持续迭代飞轮。公司规划的核心产品形态包括:复合传感模组-集成多模态感知硬件的端侧设备;域控制器-面向机器人场景的实时计算平台;时空智能大模型-具备推理、预测和决策能力的基座模型;数据服务-面向行业客户的数据与能力输出;模型授权及行业整体解决方案。重点面向需要机器人在复杂环境中自主移动和作业的多类场景。
公司产品落地路线图清晰,未来一段时间内将完成从模组到模型的全链路产品化,并优先在2至3个高价值标杆场景中实现规模化部署。
PART.05
各方观点
押注物理世界的时空智能核心能力
北京顺禧基金:
“时空智能是智能体走向真实物理世界的核心能力。中科煜坤团队兼具长期科研积累、核心算法能力和复杂场景落地经验,技术路线清晰,产品化路径明确。北京顺禧基金选择独家投资,是基于对团队长期技术壁垒和北京人工智能产业生态价值的判断。”
中科融合创新加速器:
“中科煜坤团队在三维视觉、时空智能和机器人系统方面有长期积累,技术方向面向真实物理世界中的机器人规模化落地,具备清晰的产业化价值。中科融合创新加速器将继续发挥孵化作用,通过追加投资、产业资源链接和场景协同,支持中科煜坤加快产品化进程。”
PART.06
长期愿景
赋予“硅基生命”类人行为智能,建设人机共融新生态
公司CEO卫浩博士表示:“机器人真正进入开放动态环境,不能只依赖单一感知或单一模型能力。中科煜坤希望把三维空间感知与理解、世界模型和行动决策打通,让机器人具备时空智能能力。本轮融资后,公司将优先投入核心产品研发和标杆场景落地,把科研积累转化为可规模化部署的产品。”
未来,中科煜坤将继续围绕“感知空间,推理世界”的技术愿景,推进时空智能复合传感模组、域控制器和基础模型迭代,加速在开放动态大范围场景中的机器人自主移动与作业应用落地,建设面向人机共融时代的物理世界时空智能基础设施。
本文来源:财经报道网

证券之星网站
2026-06-30
中国网财经
2026-06-30
财经报道网
2026-06-30
财经报道网
2026-06-30
财经报道网
2026-06-30
财经报道网
2026-06-30
证券之星资讯
2026-06-30
证券之星资讯
2026-06-30
证券之星资讯
2026-06-30



